`@ozoned` interviewed me on my home cockpit on a live stream via his #Owncast instance at https://stream.ozoned.net/. This is a more condensed version of the stream that is still just 1h shy. We’re going over almost every feature of my Primary Buffer Panel and I explain how everything works. I also decided to add various photos, slideshows or video snippets during the talk only sections so things don’t get too boring. Sometimes that even complements the talks 😄
Ever wondered how to start your own DIY #homeCockpit / #SimPit on? It’s easy. Just watch this stream 🤓
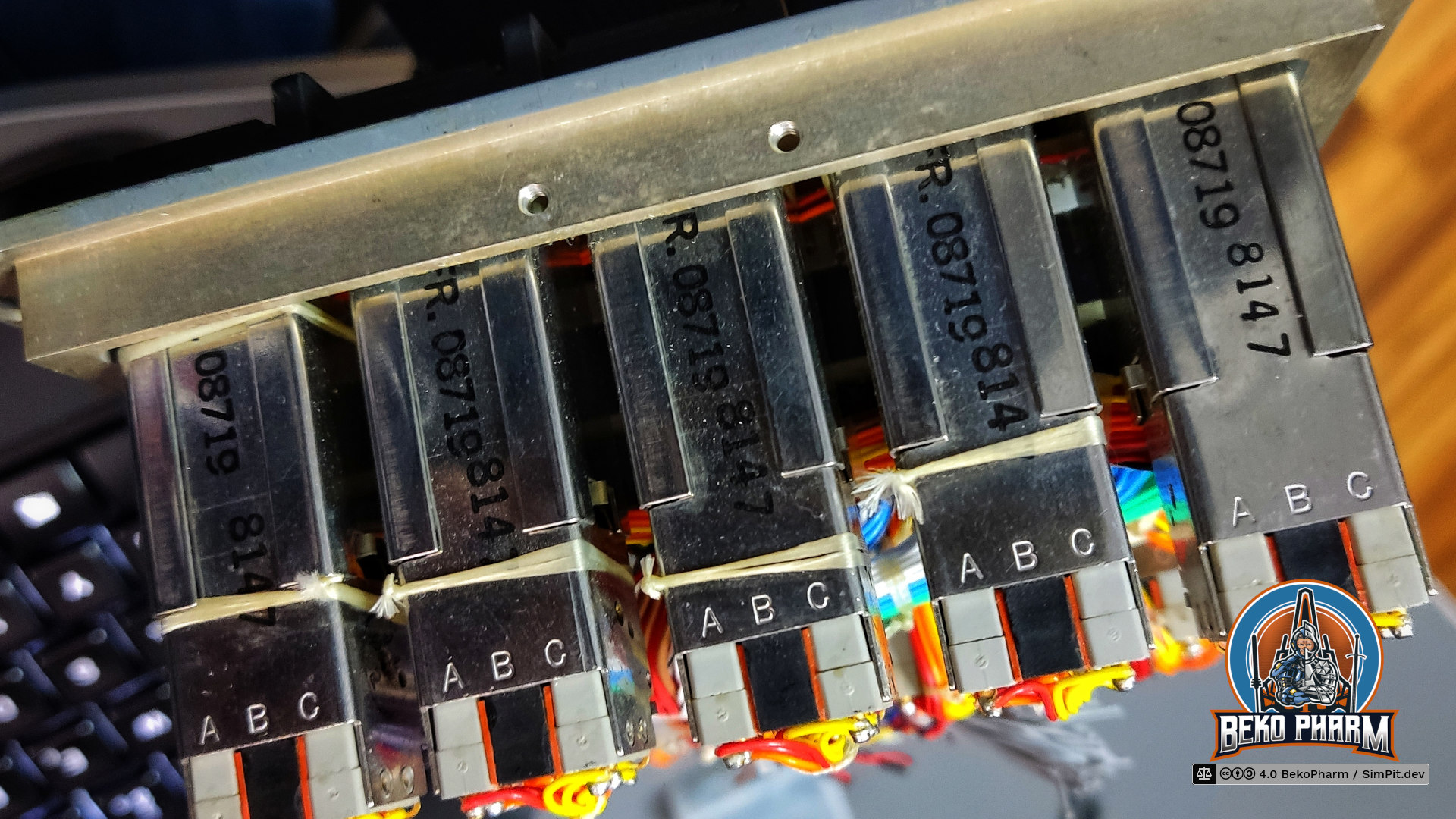
So I started taking a closer look at the various panels I got with the old #ViperPit, which is a challenge in itself, since not everything has a handy badge telling me what it is. It’s also not like I’d have a clue in the first place. Figured out that this one apparently belonged into a #Panavia#Tornado but I don’t know the exact model yet. It was installed in the rear cockpit on the left side of the front panel and operated by the Weapon Systems Officer and is apparently no longer in use since ~1990. It’s safe to assume that this thing did see action and was closer to space than anything else I own.
Side view of the buttons array
Next was finding out how this thing is wired to see if I can convert it into a button box for PC gaming. The segment displays look pretty straight forward and I’ll definitely need some multiplexers to drive them but that has a low priority. The switches can easily be checked with a meter but thanks to @kranfahrer@mastodontech.de I was able to track down some wiring diagrams as well. Turns out these are not also very old but apparently rather pricey too? Someone mentioned an eBay offer for whopping 300 USD for a single button – which is insane to me 🤯
Backside of the Tornado WCP showing beautiful cable lacing.
Speaking of wiring: The backplate may be missing but some of the original cable management is still in place. This is where we can see the rather beautiful cable lacing, which is used in avionics for bundling together wires with waxed nylon or linen cord in an environment with lots of shaking and vibrations. No I didn’t know this before and would probably have ignored it but A Hornet’s Nest just released a video about Cockpit Cable Management where he talks in detail about this technique. Great channel!
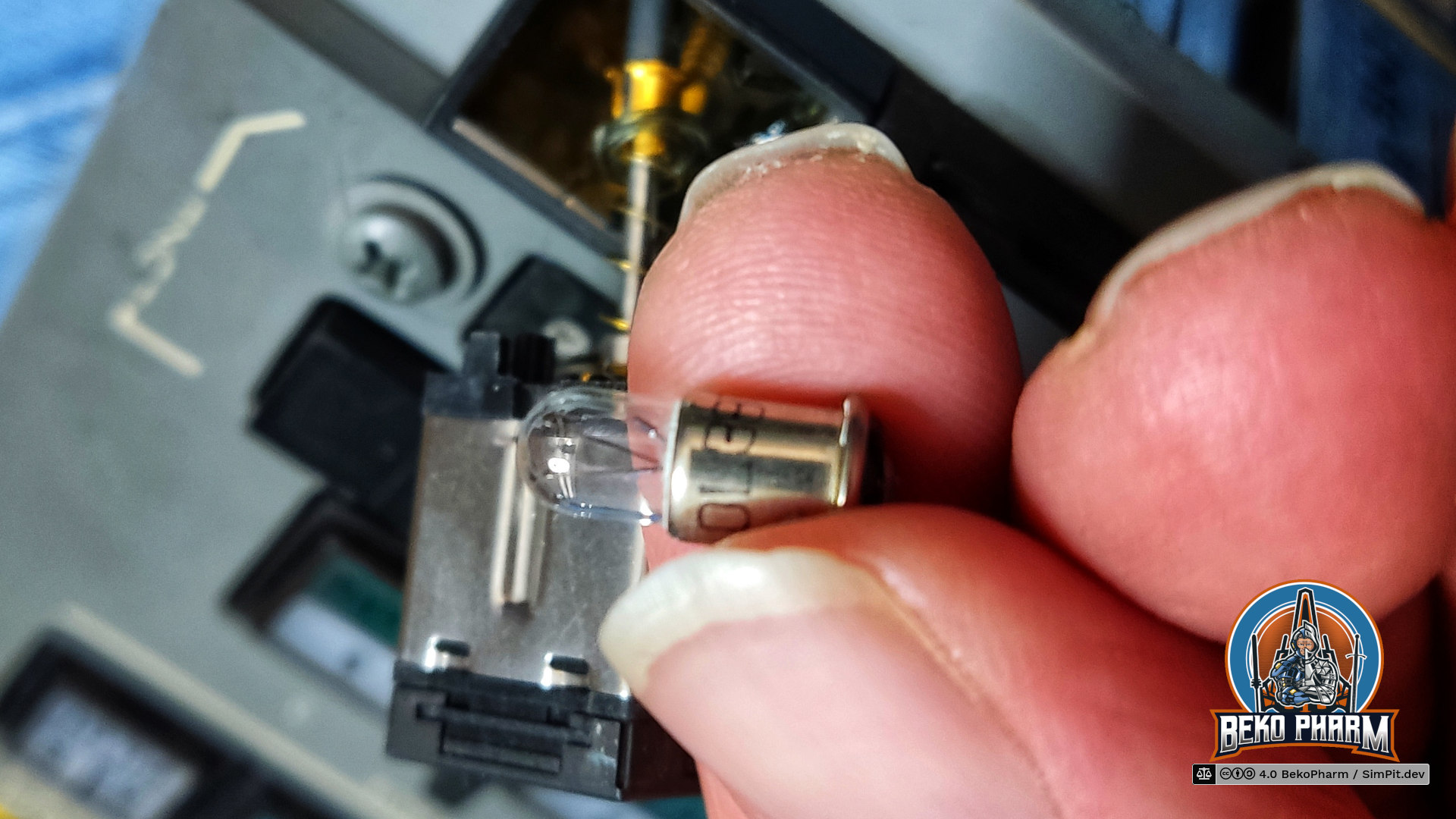
The lamp used in one of the buttons is not even LED yet
Another question was for what voltage the lamps are designed for. Each button comes with at least one lamp. This is a rather old fashioned and not a LED yet (and in fact LED replacements are rather expensive even). This specific one is the model OL387 rated for 28V DC and 40mA. Apparently this all is up to military spec MIL-S-22885 and bright enough to still be readable in sunlight and comes with high duty cycles before it needs replacements – so it will probably last a lifetime in my man cave 🤓
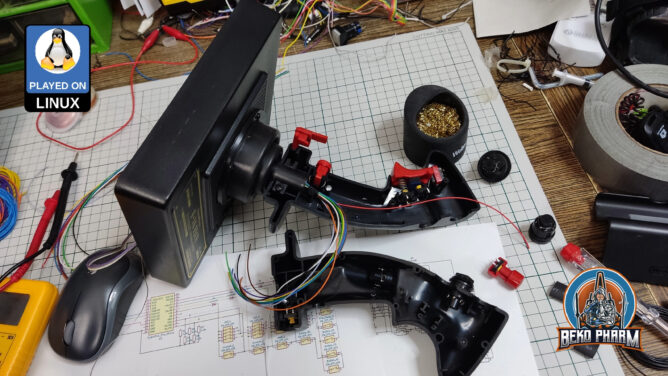
This video is how I gutted my already modified old Thrustmaster F-16 FLCS joystick of my ViperPit and made it work again with the help of an Arduino Pro Micro. This flight stick (and also the other peripherals) do belong in a museum but where’s the fun in that? I modified it and now it’s a generic USB joystick that works on any recent system. I focus mostly on the 5×5 button matrix since this is the hardest part to understand. In the end are a few minutes of playing X4 Foundations with it to give it a good test run. Now it just needs some oil for the creaking 😅
Oh boy oh boy it arrived. And what a friendly seller 👌 Kinda a shame that they gave up this hobby. Sold everything for an apple and an egg. It’s a #ViperPit#SimPit loosely based on a F-16. Nothing of this is functional though. Yet.
Winter may come!
Man… the _feel_ of those lovely switches and dials alone ❤️
This works way better than I expected. This is a static image test for a HUD on my home cockpit using a dead cheap beamsplitter made of plexiglass and a smartphone o0
Getting better in #FlightOfNova 💪 Delivery mission without breaking… much 🤡
Man… I need telemetry data for this game. That’d be so freakin awesome 🤓
I had the chance to play Flight Of Nova (https://flight-of-nova.com/) for the first time today. This was on my wishlist for quite some time now. Dived in blind and had no idea what to expect. 3 tutorial missions later: Oh boy… this is hard. I can see myself sinking many hours in this.
Anyway, as usual, my focus is on interfacing with my home cockpit (or simpit) and while there is no ship telemetry [yet?] I was able to get it running just fine via Proton and with my DIY headtracker using OpenTrack. Hats off, seldom that I see a game that detects my joystick just fine, has great ingame calibration, offers me a windowed mode and a bunch of ultra width resolutions without having to resort to hacking config files or use gamescope to resize it ❤️
Head tracking is, as usual, TrackIR only so far (I guess the native Linux PC version does not have UDP in place here but I couldn’t check due Steam refusing to download another version today). Anyway, you can see me fooling around with the buttons and do an A+ crash landing in the end – sunny side up 😆 Not too shabby considering that this was my 3rd landing at all.