🔖 https://www.digitaljoshua.com/modular-flight-simulator-panels-and-button-boxes/
Not often I’m mind blown by what some people come up with to scratch their itch. Swapping panels easily thanks to cable management kits is a great and cheap idea.
This video shows you how to build modular Button Boxes or Flight Simulator Panels, without the need of 3D Printers or extra hardware.
🔖 https://www.digitaljoshua.com/modular-flight-simulator-panels-and-button-boxes/
Not often I’m mind blown by what some people come up with to scratch their itch. Swapping panels easily thanks to cable management kits is a great and cheap idea.

So I dunno if you know what a #VFD (https://en.wikipedia.org/wiki/Vacuum_fluorescent_display) is but I’m a sucker for these – at least virtually.

Games like #RebelGalaxyOutlaw perfected the look and this is where I want to go with my #Arwes HUD app for my #EliteDangerous / #X4Foundations home cockpit too.
The segment displays are heavily inspired by #AugmentedUI project (https://augmented-ui.com/) where I’ll borrow some more elements. Learned the neat fake scan lines from there too. And yes the 8 segment display works by shifting bits under the hood 🤓 This isn’t really needed for an app but I have plans to add some real segment displays eventually (I do have a whole box full with these!) so I wanted to know how to implement this anyway.
Video from an earlier stage in the development demos the scan line effect.
The bars are configured with parameters in size, count, percent, colours and thresholds 😁 I also added a random chance of 5% to shift the hue a little bit because just as in real life nothing is perfect.

And yes they are fully themed so switching the colour theme also affects the virtual VFDs.

I’m also going to replace the older horizontal bars, that look way too boring in comparison.
It’s still very early but I hope to get some rad animations going too. See https://www.hudsandguis.com/home/2022/retro-digital-dashboards to get an idea in which direction this is going 🤓
See the dedicated project page https://SimPit.dev for more details on this #Macross #VF1 inspired #cockpit panel.

Quick demo time: I got a touch display 17.3″ that will replace my rather old one in my VF-1 inspired cockpit panel.
Pick your poison: https://www.youtube.com/watch?v=KX4LsyqYPCA / https://makertube.net/w/nCopvNbkvkwR9XcG5QPQ3i
Mostly because of the bad viewing angle. I’m not a huge fan of touch but sometimes it is really useful and if I already spend money why not go the extra mile 🤓
The primary collection of Lua scripts, custom SEXPs, and custom AI for FSO - FSO-Scripters/fso-scripts
Going to investigate – apparently FSO can use fifo pipes too and this example may help me get ship telemetry going for my #simpit.

Played #XWVM (closed) Alpha with my #Macross inspired #SimPit. I’m simply in awe that I can replay missions from #XWing (or #TIEFighter) with more modern graphics and modern interface devices again. I spent _so many_ hours playing these #StarWars games as a kid.
This is the heavily cut VOD of the live stream over at @bekopharm@live.famkos.net (pick your poison):
https://makertube.net/w/r1LRrqDWnhw4wRk92uNfzo /
https://www.youtube.com/watch?v=9T2jxqT_5sU
This time I play with the native Linux version and my X52 Pro joystick (which means I actually have a chance of hitting stuff too). The following missions were played:
Historical Mission 2 / Wingmen Are Important
Historical Mission 3 / Sattelites Near Coruscant
Historical Mission 4 / Beating The Odds
OP 1: Destroy Imperial Convoy (Uncut)
OP 2: Reconnaissance Mission (Uncut)
OP 3: Fly Point During Evacuation (Uncut)
OP 4: Protect Medical Frigate (Uncut)
XWVM is not an official product from Lucasfilm Ltd. or Disney. It is not endorsed or authorized by either. It is a fan recreation of the game engine used to play X-Wing and TIE Fighter for the sake of accessibility and requires the original game assets to work.
Kudos to the XWVM team, they are doing a stellar job here.
The dedicated project website for the Macross inspired SimPit is https://simpit.dev

I gave in and changed my event forwarding method in node-red for the Elite Dangerous Journal. This file is updated on various in-game events but in a way that makes it difficult to get new events only since last update. Another problem is that it’s not really a valid JSON file because it has one JSON per line but it’s not a valid JSON array. This is why it has to be parsed line by line and mashed together by event type (name) again to get the latest data for each event type per dump. Each event has it’s own timestamp by set by the game. The latest timestamp is now saved on the special flow const so node-red keeps the value in the “global” memory of the current flow:
msg.payload.event = "Journal";
let newJournalTimestamp = flow.lastJournalTimestamp;
Object.keys(msg.payload).forEach((key) => {
if (msg.payload[key].timestamp) {
const keyTimestamp = new Date(msg.payload[key].timestamp).getTime();
if (!flow.lastJournalTimestamp || flow.lastJournalTimestamp < keyTimestamp) {
// this entry is new - keep it. MULTIPLE events may have the
// same timestamp so wait with reassigning so we don't skip
// em or get the latest a 2nd time if nothing else changes.
// update the next latest timestamp if this is newer
if(!newJournalTimestamp || newJournalTimestamp < keyTimestamp) {
newJournalTimestamp = keyTimestamp;
}
} else {
// lastJournalTimestamp is newer, skip this
msg.payload[key] = null;
}
}
});
// make sure this is a valid date for the next time
flow.lastJournalTimestamp = newJournalTimestamp || new Date().getTime();
// remove all nulled events from the payload
msg.payload = Object.fromEntries(
Object.entries(msg.payload).filter(([_, p]) => p !== null)
);
msg.payload.timestamp = new Date(flow.lastJournalTimestamp);
return { payload: msg.payload };So I do now keep track of the last read timestamp and reject every event that is older than the last read keeping the Journal dump smaller. This way I don’t have to try to keep track of the “latest” event to drag data from. Refuelling e.g. can happen from whopping 4 (or more) different events and it’s painful to compare all and check which one is the latest to keep track of the real current fuel levels for each tank.
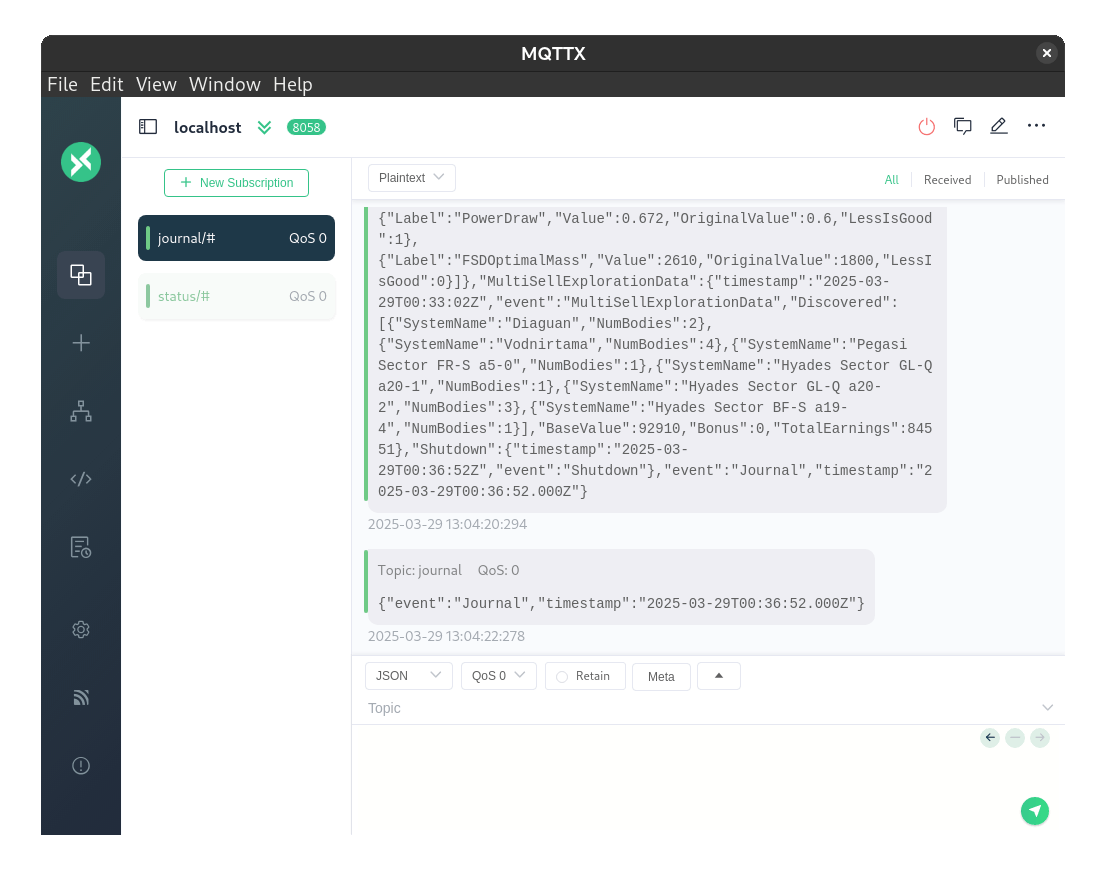
Downside is I won’t get a full set of data for the current session any more if I have to reload my HUD app. This could be mitigated by using MQTT though where I could simply persist each event topic. That is already implemented and I can choose between SocketIO or MQTT in my app anyway.
This uses my X4-SimPit extension for X4: Foundations, that sends ship telemetry via a socket to my node-red plumbing pipeline, which in turn forwards data to Websockets, SocketIO and MQTT. Various subscriber listen on the new messages to run blinken lights and my HUD app. I’m using the well known message format also used by Elite Dangerous so it’s compatible with that game as well.
Pick your poison: https://makertube.net/w/nUoG2ZPeAW1QhT3A2BXRrM / https://www.youtube.com/watch?v=wp1PkVhH9cc
Oh yeah… and on Linux PC 🤓
Let me know what you think!
X4-SimPit code (pending changes) is here: https://github.com/bekopharm/x4-simpit
The cockpit panel has a dedicated project page here: https://simpit.dev/

So bear with me if I mix something up, this is all news to me and I’m still flabbergasted. I got myself some XR glasses mostly for watching movies and perhaps some gaming on the Steam Deck a while ago.
Now I learned about “SBS” (Side-By-Side) mode like ~3 days ago, that the glasses support. I tried this with the game Elite Dangerous first, since this has an SBS mode built in too, and was mind blown. My current favourite time stink is Ace Combat though so I started digging.
Turns out there is this Reshade tool that would forcefully enable such a mode for basically any game with the right shader. Several exist but the first I found, “SuperDepth3D.fx”, seems to do the trick. Enabling it split the 1920×1024 in half with two slightly different view ports, one for each eye. There are many options to fine tune this and I’m still fiddling with this to find the perfect settings but results look great already.
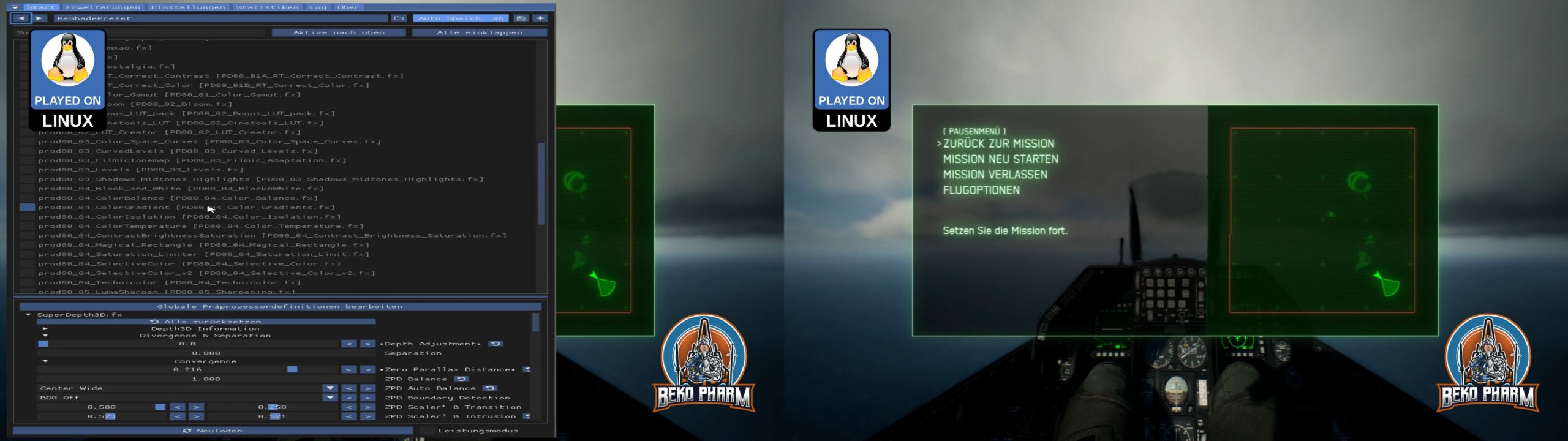
My glasses do Full SBS though and have a resolution of 3840×1024. I read somewhere that wide-screen is possible with more DLL shenanigans with Ace Combat 7 too but I run the game on a Linux PC anyway, where we utilise a tool named “gamescope”. This allows basically to configure a virtual display for each game and override the game resolution in various ways. It also has a stretch option, which is exactly what I needed to get the “compressed” SBS view from 1920 to 3840, where the aspect ratio would fit again. BTW: This also has FSR built in so any upscaling looks good enough too. I’m not entirely sure but I think there’s a similar tool on Windows called “Virtual Deskop”?
Anyway, I already managed to get my head tracker working by mapping the output to a virtual gamepad on the look-around axes before. I also found a mod that enables a wider FOV. Imagine my stupid grinning when everything fell into place: Full SBS with head tracking, a more sane FOV and yes, I jumped all the hoops to get my HOTAS and rudder pedal of my old ViperPit working (which is a different story because my devices are so old that I had to upgrade em to USB before, which involved some Arduinos, programming and soldering). I guess that makes me a member of multiple niches at once 🤓

And since I’m aware that nobody can “see” what I’m talking about, without having XR glasses or a VR headset (or a DIY VR Box for smart phones) on their own, have also an Anaglyph 3D render. This requires just some old school two coloured (red and cyan) glasses often made of paper, that many people still have around somewhere, to get an idea.

The colour of the sky? It’s perfect. A deep dark blue.
Update: There is now video footage: https://www.youtube.com/watch?v=NckLvP1HBGw

My #ViperPit got an awesome upgrade today. It’s a pressure activated heating mat for the seat usually used in cars (12V are 12V 🤷). For the record: I have to heat full power to get my cave to 18C during the wintertime wasting a lot of energy. This doesn’t make much sense so I’m really happy with my solution that I also have in use for my office chair for years now 👌
『エースコンバット7』バンダイナムコエンターテインメント公式サイト
Got some help carrying the #ViperPit from the basement into my man cave today and since I got the peripherals operational again already, and got Ace Combat 7 on a sale, which seemed to be a good fit, I decided to play that first:
https://makertube.net/w/wiKFYNPaKhhCmrrz3aGLYb / https://www.youtube.com/watch?v=HEPK0lHX_3s
Little did I know what a pain in the neck it would be to get this running. No, Linux wasn’t the problem. That was just Press Play, as usual.
There is however no settings menu for #HOTAS joysticks so any mapping has to be done by manually editing the `Input.ini` of the game in an text editor, which is a guessing game. Head tracking is also a no go. I pulled the old trick to map the head tracker to a virtual XBOX controller but the game comes with an annoying deadzone where the camera snaps to the center.
Ah well, got it all working okay-ish in the end and enjoyed some pew pew in the skies. There seem to be plenty of #Macross mods too so trying that will be next 🤘