This is heavily distilled early gameplay of X4: Foundations, where I started another play-through slowly expanding my little empire with trade, side missions, station building, border patrol (loosing the the “Misfit”, my good old starter-ship), a surprise Xenon attack on a station where I was just for shopping and eventually good old fashioned piracy with unexpected guest appearance of some Kha’ak trying to crash the party.
01:11 Setting up trade routes aboard The Law Abiding Windrunner 02:20 Switching over to the Misfit 03:05 Witnessing the death of a trading station (while escorting my own ships to safety) 03:50 Patrolling for money (and looting stuff) 05:48 Repairing satellites (in EVA suit) 07:32 Docking at the impressive Teladi ring station for shopping 08:45 Surprise attack on the ring station by a Xenon K (and it’s demise) 14:32 Extending my own station and buying more mining ships 11:26 Switching over to my frigate for border patrol (lots of pew pew) 14:30 Loosing the Misfit to Kha’ak (and avenging it) 16:07 Going for resupplies and preparing for piracy 16:39 Ambushing the prey, a fat water freighter looking for a new owner 17:59 Starting the boarding operation 18:40 Realizing I need more support to deal with surprises 18:58 Stumbling over mentioned surprises, Kha’ak trying to crash the party 19:51 Sending more boarders as the first group fails 20:22 Finally going home with the price, a “slightly banged up” L water freighter
The official website of indie game studio DBK Games, the developer of SpaceBourne series and Mesel.
So this was recommended to me by Patola and while I usually do not buy into an early access game I made an exception. I’ve only seen one hour of the game so far but this promises a lot of fun. It’s still very rough, that I can tell – and often inputs do not register or register double. Nonetheless I felt right at home and after a lot of fiddling with the inputs I was happy enough to give it a spin with my X52 Pro (that was indeed detected just fine after the initial tutorial).
So after learning the basic ship navigation and shooting up some drones during the first quest I got ordered to investigate some asteroids.
There were of course some pirates hanging around and the shoot-out did take more time than I’d like to admit. For some reasons I could not for my life get any target lock so all the shooting had to be done with the good old Mk 1 eyeball without having an idea about reach (or even arcs?) of the weapons. Probably a bug. Or user error. The jury is still out on that.
Next was a surprise. After parking the ship in stealth I was ordered to exit and do a little space walk to clear a hidden platform of hostiles. Space diving was not on the things I expected 🤯
Anyway, after some more shooting, and some more explosions, I was back with the contractor and the reward was for reasons yet unknown a freakin robot head. That kicks off a quest to reassemble that poor thing. For some reasons this unfolded into an epic space battle where two different fractions slugged it out in the middle of an old battlefield with me, the contractor helping with the parts and the robot head in the middle – also somehow attacked by scavengers as a 4th faction. What a chaos!
After surviving this I got recommended to someone else to get the robot assembled again. The person that would be able to do this resides on a station in another system though, which means travelling through a… stargate. Awesome! After filing a flight plan and requesting passage I had to line up my entry and found myself in another system – surrounded by illuminated advertisement of all things, of course.
An in-system jump later I docked at a station and found the contact that would help me with the robot. For a price, of course.
This was where I decided to stop for today. So much stuff happened during the first 60 minutes of this and judging by the in-game menus there is a lot more to come. There are skill trees, load-outs, factions and many systems to explore. Yes, it’s not as beautiful as StarCitizens but it’s perfectly playable already and I’m getting Wing Commander vibes from that and this feels rather good.
I didn’t use my Steam Link for some time and was kinda surprised by the new UI in Big Picture Mode. And also very unhappy because it was a stutter feast with buffer artefacts all over the place. Once I could get a game running it was butter though so something was up with the streaming mode of the UI. I’ve no really an idea what’s going on there but this was always a problematic thing with my AMD GPU under Gnome using Wayland when it comes to streaming and remote play. I ticked off the basics and disabled the blocklist for unknown GPUs, made sure that AMD hardware acceleration was enabled for the host in the Big Picture setting and even tried to launch it with the old big picture mode but no dice:
steam pipewire -pipewire-dmabuf -oldbigpicture
After reading around a lot on the bugtracker at https://github.com/ValveSoftware I eventually learned that the hardware acceleration for remote play is usually done with VAAPI and that there is debug information in ~/.local/share/Steam/logs/streaming_log.txt and sure enough here it was:
ffmpeg verbose: libva: VA-API version 1.16.0
ffmpeg verbose: libva: User environment variable requested driver 'radeonsi'
ffmpeg verbose: libva: Trying to open /usr/lib/dri/radeonsi_drv_video.so
ffmpeg verbose: libva: Found init function __vaDriverInit_1_16
ffmpeg verbose: libva: va_openDriver() returns 0
ffmpeg verbose: Initialised VAAPI connection: version 1.16
ffmpeg verbose: VAAPI driver: Mesa Gallium driver 22.3.5 for AMD Radeon RX 6700 XT (navi22, LLVM 15.0.7, DRM 3.49, 6.1.11-200.fc37.x86_64).
ffmpeg verbose: Driver not found in known nonstandard list, using standard behaviour.
ffmpeg verbose: Input surface format is nv12.
ffmpeg verbose: Compatible profile VAProfileH264Main (6) is not supported by driver.
ffmpeg error: No usable encoding profile found.
So the profile was missing and a check with vainfo confirmed this:
This was the moment when my brain did pull off one of it’s tricks and remembered me about the story about Fedora _disabling_ hardware acceleration for H264 due to proprietary concerns some months ago and yes I did recently upgrade to Fedora 37 🤯
Thankfully the community stepped in already and fixed mesa drivers are only one dnf install away on rpmfusion, so there is no need to recompile this with h264 support (and some others) manually. There is a caveat though because the swap command would happily delete the needed 32bit versions for Steam and only install the 64bit version of the swapped package. Keeping this in mind the required commands are basically this (and if this breaks your system I do not want to hear about it – use your brain!):
And sure enough the Steam Link started working again. Somewhat. Now I have issues that some games don’t get captured or loose focus eventually but that I’ll debug another day 😩
Video: Starting Steamworld Dig 2 and showing system overview
Linux Gaming in 2023 is easy. Remote Play… not so much.
Some time ago I needed a virtual #ARM machine and while I’m not entirely sure any more why that was I did seem to have an inspirational moment and made a template of this. Here is what the #qemu config for #Proxmox _may_ look like:
It makes sense to install the package cloud-init to some stuff can be set from outside of the machine.
…and yes, it’s just as slow as expected from an ARM 🤓
I’m also not entirely sure if this is really officially featured by Proxmox (just like btrfs 🤷) but the machine was doing it’s job without an issue for years and I did just replay the template on VE 7.4 so I guess it’s fine 🤷
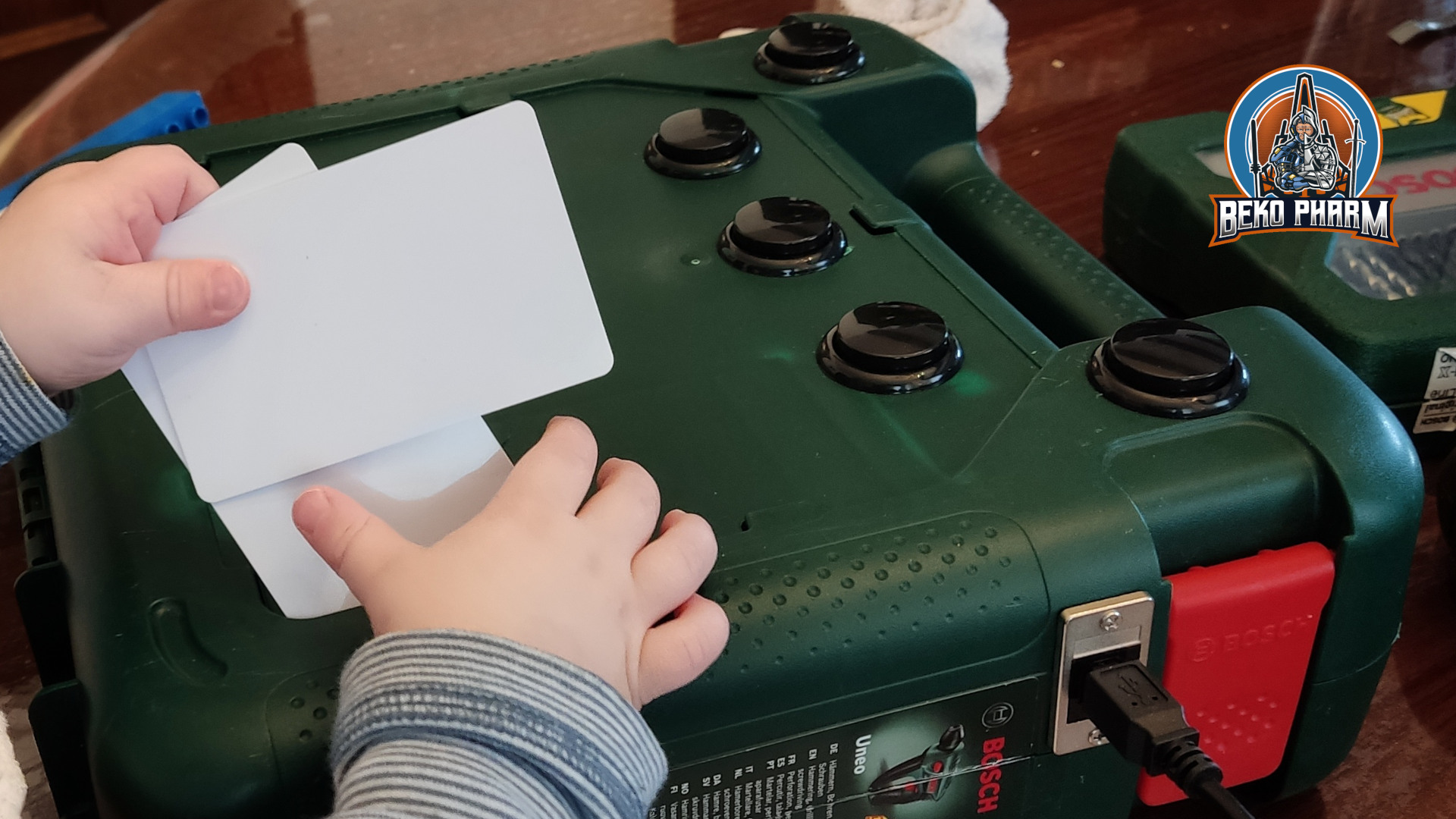
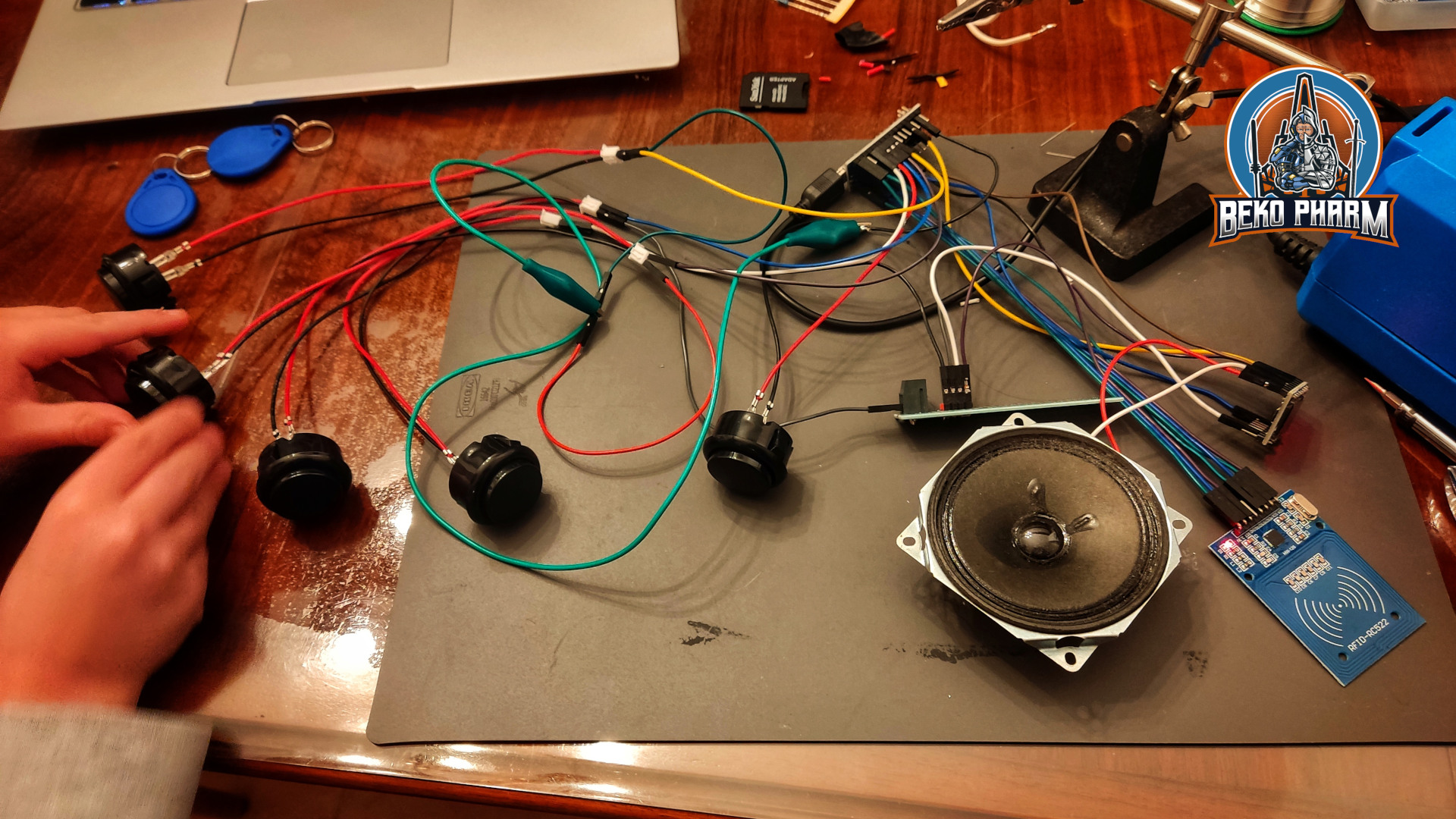
This is a project I kept postponing for years but when I eventually got my hands on all the required parts I had no longer an excuse and eventually built the first. It’s a portable music player for children that does not require internet access. It features selections of pre-installed music or audio books via RFID cards, that may come in all shapes and may even be integrated in toys. There are also 3 to 5 playback controls in the form of huge arcade buttons. Ideal especially for our middle one, who has to endure stationary stay for most of the week in a hospital.
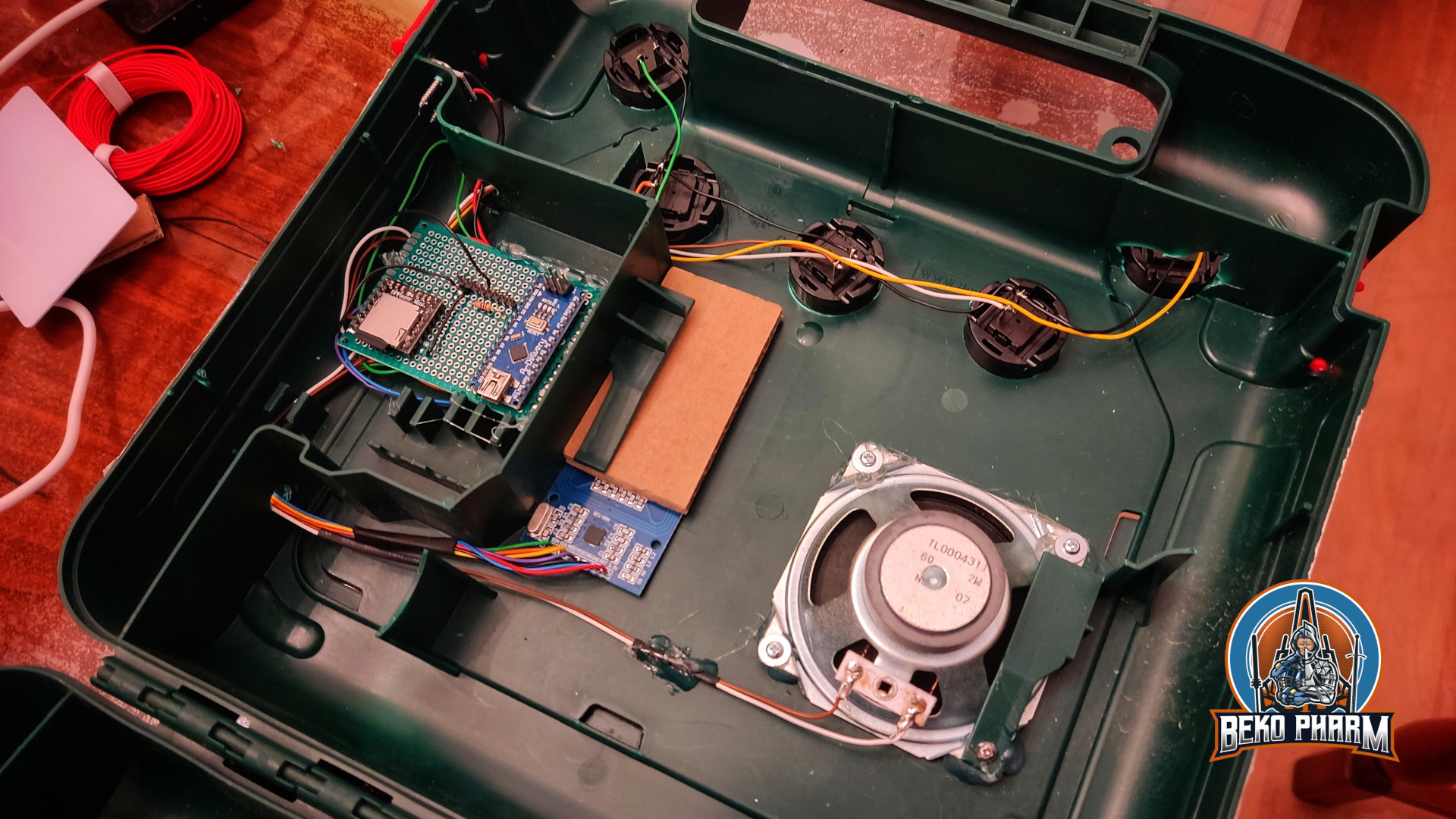
And while this box is still missing proper decorations and button decals it’s full functional and portable. Also hey, kids ain’t stupid – they find the proper button without decal too. Even the baby found out where to put the RFID cards for the music to change 😉
The leg work for this was done by @xfjx@chaos.social and the project is described in great detail at https://www.voss.earth/tonuino/ – I did however not order the offered PCB and just soldered everything to a generic maker board to keep the costs down. Just like the arcade buttons, that I had left over from another project, I also have a bunch of such boards. The speaker was salvaged from an old entertainment system that broke down long ago and the box… ah well I guess it speaks for itself. Can’t say I was happy with the drill but the box was just perfect for our purpose.
First we built a test setup after salvaging all the needed hardware. The Ardunio parts are off the shelf, nothing special here. I had to improvise a little on the wiring due to missing wires. I opted for the older branch that just needs Arduino Studio, to install the software itself. There is a more modern version using platformIO but something with that does not like my vscode and I never managed to successfully compile it.
I eventually got the idea how the RFID cards worked and could be trained to the system and also did some tests like it’s maximum power usage. It has a passive speaker and cranked up to max it would consume 0.09A max – and on regular volume it was sitting at comfortable ~0.06A. Which is pretty fine. This would run for days with a decent power bank that could be dropped right into the box later if no external PSU is used.
Next was preparing the box. Luckily I had just the right drill for the buttons but making the holes was a pain in the neck. This had to be done very slow because the hard plastic would easily rip and splinter. I opted for a very massive USB connector in the end because the microUSB one used first broke on the 3rd use already. That was probably a little bit too cheap. The replacement is way more sturdy, which is kinda what I want for the children anyway. Everything the box needs to operate, like an old phone charger, a very long USB cable, and the RFID cards do fit inside the box for transport.
So one of the questions left was what to put on it’s internal SD card. Some of their favourite music, of course. What else though? Easy. We have a public audio centre at https://www.ardaudiothek.de/ offering a lot of stories and podcasts even for children. Downloading them one by one manually was cumbersome though. Luckily @1337core@chaos.social was just releasing his first version of Audiothek Downloader at https://github.com/Leetcore/audiothek-downloader so I had more gigabytes than the SD card could manage in minutes. The only issue was that the SD card needs the audio files enumerated so I did some quick scripting to rename the downloaded files. I had also no use for the downloaded cover images. It’s not beautiful but it got the job done:
#!/bin/bash
folder=$1
oldpwd=`pwd`
if [[ -z $folder ]]; then
echo "Missig paramater id"
exit
fi
folder="output/${folder}"
if [[ ! -d ${folder} ]]; then
echo "Missig folder ${folder}"
exit
fi
cd $folder
shopt -s extglob
for filename in +([0-9])_*.*; do
[ -e "${filename}" ] || continue
oldfile=${filename}
# remove including the first underscore to get the index
index=${filename%%_*}
index=${index##+(0)}
# pad the number with zeros
newfile=`printf %03d ${index}`
# combine new index with old filename, remove up and including first underscore
newfile=${newfile}_${filename#*_}
if [[ ! -f ${newfile} ]]; then
mv -v "${oldfile}" "${newfile}"
fi
done
declare -i n=1
declare -i i=1
for filename in *.mp3; do
[ -e "$filename" ] || continue
target_dir=`printf %02d ${i}`
if [[ ! -d ${target_dir} ]]; then
mkdir ${target_dir}
fi
target_file=`printf %03d ${n}`
if [[ ! -f "${target_dir}/${target_file}" ]]; then
mv -v "${filename}" "${target_dir}/${target_file}.mp3"
fi
n+=1
if (( n > 255 )); then
n=1
i+=1
fi
done
cd $oldpwd
exit 0
This goes into e.g. to-tonUINO.sh into the root folder of the Audiothek Downloader where it can be executed after downloading a category. Like this for example:
The resulting folder|s can be renamed, depending on what is already on the SD card, and moved to the SD card. It also makes sense to set the RFID card to audiobook mode so the TonUINO saves the position for the listener and does not start at the beginning again.
Now it’s up to the children to do some decorations. Our oldest wants her version built into a box that looks like a book. Hope we can get that one done soon too.
I usually play #FlyDangerous on Linux PC. I switched to Proton because I was eager to see some upcoming changes, like #headtracker support, on the public_beta branch. And while this works[1] I was once more flabbergasted how complicated it is to set my desired display resolution of 5760×1200. I’m using a multihead setup with several displays and as usual the game engine would not let me _simply_ set that. Even in windowed mode (I mean I get that this won’t work with fullscreen).
There are several ways to work around this, especially with Proton, but I was looking for the prefs file I know from Linux. I found it in the end in the file compatdata/1781750/pfx/user.reg (that’s like the Windows registry but as plain file read by Wine) where the values are stored as dword under [Software\\StarGoat\\FlyDangerous]. In hex.
"Screenmanager Resolution Height_h2627697771"=dword:000004b0
"Screenmanager Resolution Width_h182942802"=dword:00001680
"Screenmanager Resolution Use Native_h1405027254"=dword:00000000
So 0780 and 04b0 are in the end 5760 and 1200. And sure enough, on the next game start I get _my_ desired resolution:
Sadly when I change settings in the game this gets overwritten again – so keep a backup around and drop it in again. This may even be added to a script – let’s see how long until this gets on my nerves and I automate that.
For the interested: This is how the same thing looks on the native version in the file ~/.config/unity3d/StarGoat/FlyDangerous/prefs
Working on a #cog loosely based on NZ-43 (14C). It’s approximately 12m long 🙂
First time I’m trying my luck with a vessel and not a building. The curving is difficult to realise in #RisingWorld tho.
It started life in the old Java version of the game because the new Unity version has no posters yet. I had to segment the plan of the cog (carved in a very bad resolution from a PDF) into several in-game posters that had to be aligned in-game again to get the proper measurements.
After that I moved the blueprint of the frame over to the new version and started putting planks on it. A cumbersome process during which I learned a lot. I’ll probably make another and more improved hull based on the gathered know how.
I also fell straight into another “not yet implemented” trap. RisingWorld has a flip command to mirror an object and I kinda assumed this would work with blueprints too. It does not. And I was really not looking forward to put plank on both sides of the frame.
Luckily most of the leg work to read the binary blueprints was done by @paulevs before who released https://github.com/paulevsGitch/BlueLib under the MIT license. It has been a while that I touched Java but I could come up with some code of my own that would flip the planks only (I used rounded cubes for the planks exclusively) making use of this lib and the very first try at it looked promising already.
Here is the source I came up with in case you wonder:
I’m kinda happy with the result. This Lib also allows me to change the texture of the elements so I don’t have to worry how the used texture during the construction may look in the end.
Now onwards to improve the curves. I really wish for a bend mode where the beginning would snap on to an existing object and the opposite plane could be moved around individually.
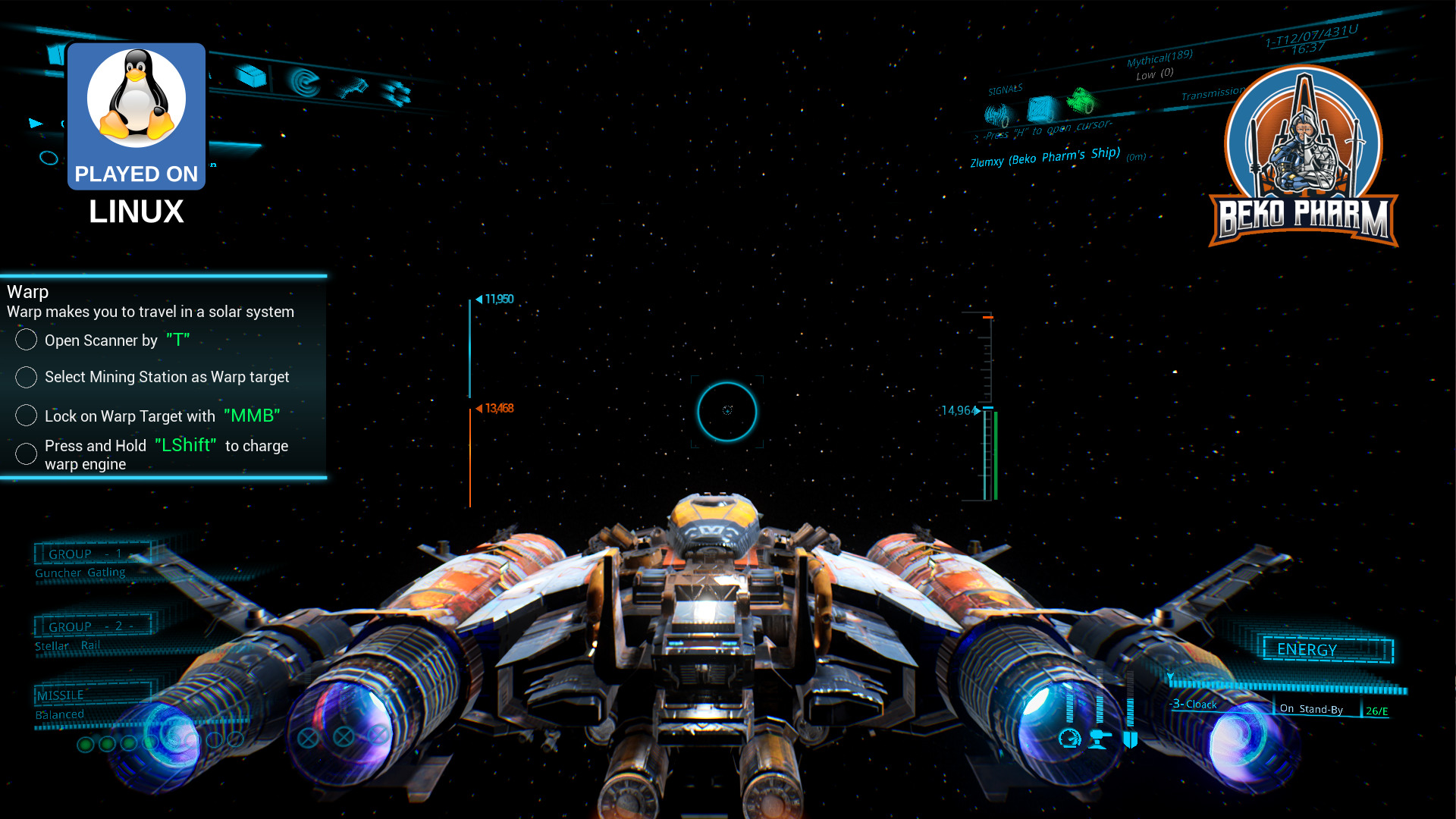
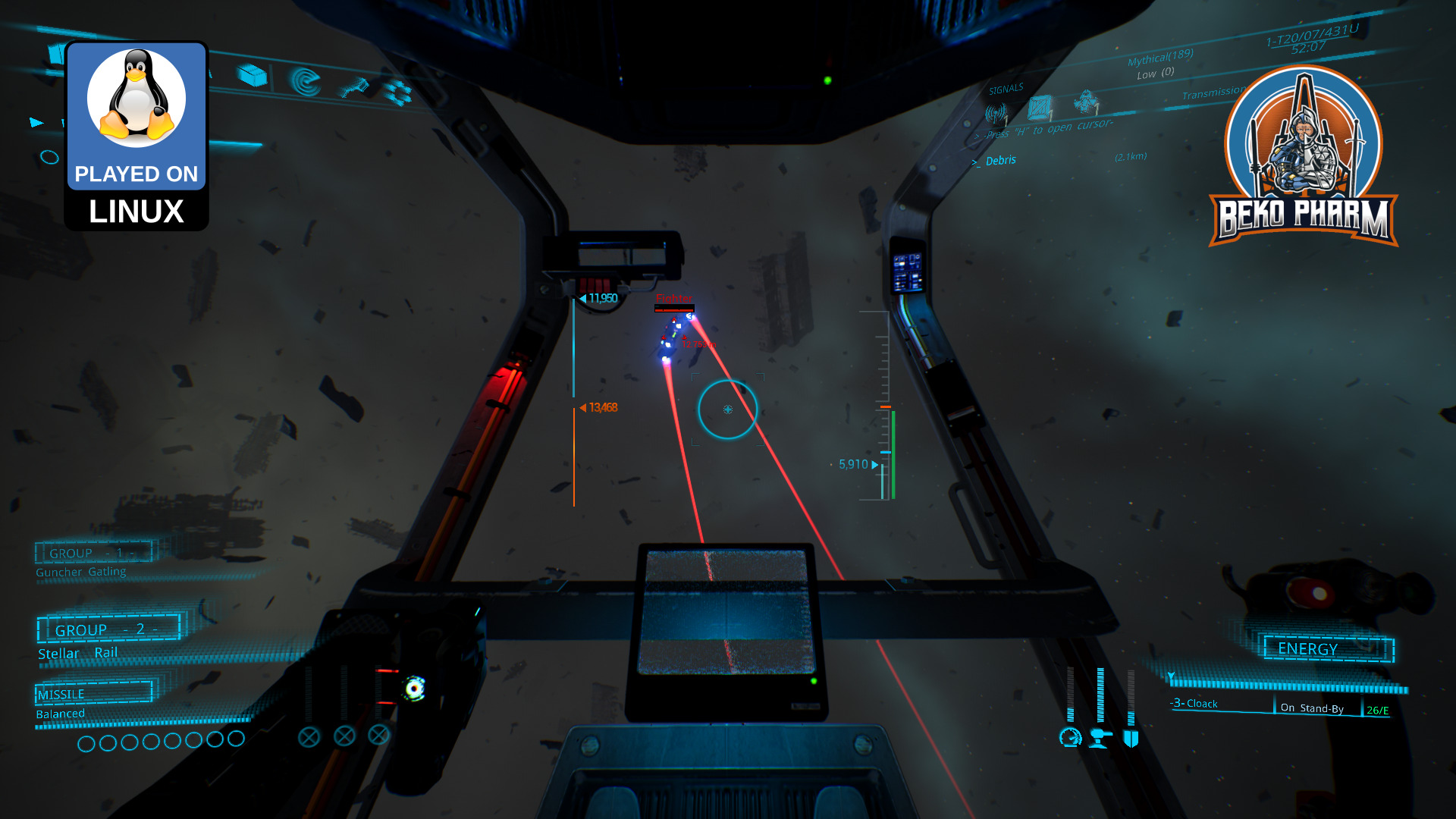
Bagged #RebelGalaxyOutlaw on GoG today and had a blast. Needed some fiddling to get my X52 Pro up and running since the game only supports _one_ Gamepad but that’s nothing that would stop my #LinuxGaming 😂
Video: Flight tutorial snippets from Rebel Galaxy Outlaw played on Linux PC
Update: I found _way later_ that there is a switch in the launcher to enable joystick support (which brings up my X52 just fiine). What a strange design decision.
Fly Dangerous 5.0 was released and it is packed with new features like reflections on the ship, Steam leaderboards and ghosts! So you can basically race against yourself or others from the leaderboards!
As usual I gave it a spin and had a blast.
First things first though. The Linux version defaults to OpenGL and this resulted in like 25 FPS for me and the input of my X52 Pro (mapped as XBOX controller) was so laggy that I could sip coffee during each course correction. This was when I remembered the magic parameter -force-vulkan from other Unity games and from here it was smooth sailing. Eventually I ended up with the game start options obs-gamecapture for recording, mangohud for some FPS info and -force-vulkan for… well, FPS.
Anyway, I’m not doing too bad after some rounds. Only issue left is that I can not disable the flight assist for some reasons. Probably a bad binding but I was eager to play so I went with it.
Fly Dangerous (on Linux PC) – with Vulkan
Oh and did I mention that this little gem is still for free and even opensource?